The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
Our economy depends very heavily on trucks, whether it's the food we eat or the device you're viewing this website on. At the same time, however, qualified truck drivers are leaving the industry in search of jobs that offer better pay, benefits, and working conditions. This leads to a growing mismatch between demand and supply.
of the tonnage that moves across America depends on trucks
driver roles in America were left unfilled in 2021—a record shortage
Let's take a closer look at why the driver shortage might be growing. Currently, when trucks transport goods from Point A to Point B, their journey would roughly look like the diagram below, where there are three separate segments, each handled by a different driver.

By introducing autonomous trucks to the middle mile, Torc helps to reallocate scarce driver resources to where they are needed the most: the first and last mile. Skilled drivers are especially valuable at the first and last mile, as those routes often include local roads and urban environments with a higher density of people and objects. By contrast, the middle mile mostly consists of highways, which are often fixed and predictable in a way that's easier for self-driving vehicles to navigate.
Ultimately, Torc's strategic focus on the middle mile is one that will benefit multiple stakeholder groups.

As shown above, the middle mile is usually the longest segment. The long haul drivers who navigate the middle mile drive upwards of 11 hours a day on the highway. These long hours, combined with the monotony of highway driving, often result in dangerous levels of fatigue and distraction. In addition, long haul drivers are often subject to unhealthy lifestyles (e.g., sleep in truck, lack of nutritious food) and spend most of their time away from home.
Recognizing the long haul truck drivers' plights and the pressure that driver shortages put on businesses, Torc (partnered with Daimler Truck AG) is working to automate the middle mile.
It seems like Torc's autonomous trucks are bound to make everyone happy, but why haven't they become the norm? In reality, we won't be seeing them at mass scale until those who regulate road conditions (e.g., police officers) can communicate with them. In other words, without the ability to smoothly interact with autonomous trucks and assess their compliance to safety standards, law enforcement will not be able to trust their operation.
Even when autonomous trucks do become the norm and police have a way to interact with them, the means of interaction shouldn't come without strategy. When police decide to pull over an autonomous truck, the truck will need to stop; the longer the truck stays halted, the more likely it will fail to deliver on time and lead to additional costs for businesses. Effective and efficient communication is key here.
Altogether, this begs the question...
The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
Keeping the question of “How might we streamline interactions between police and autonomous trucks?" in mind, we defined some key research goals:
Identify how and why police would pull over or interact with a commercial truck today
Learn about needs, potential pain points, and barriers associated with communication between police and commercial trucks
Explore and understand possible interactions between police and autonomous vehicles, assuming they have not interacted prior
Investigate information transfer and communication systems within the autonomous vehicle sector and analogous domains
To fulfill our goals, we employed a variety of research methods, making sure to build a holistic understanding of the problem space and hear from different perspectives.
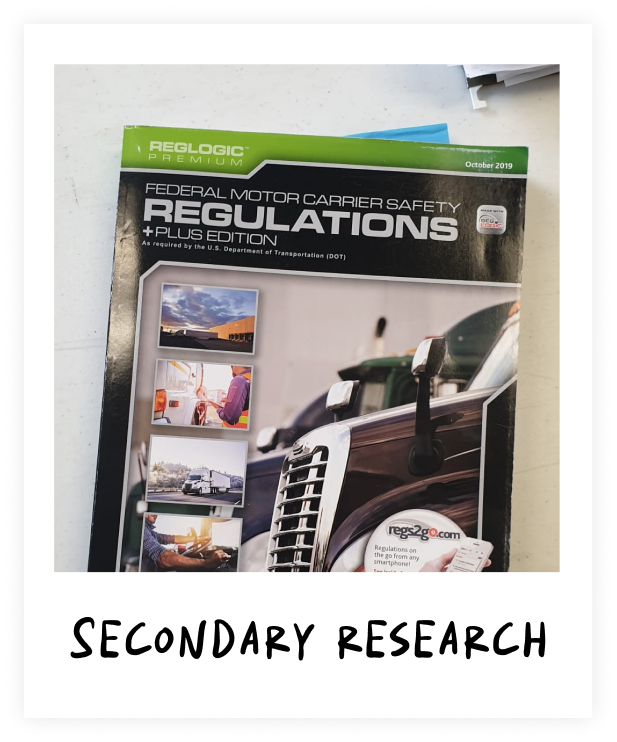
articles and
documents
to better understand the problem domain and investigate existing research and tools in the space

hours of
interviews
to surface different stakeholders' detailed thoughts, feelings, and beliefs
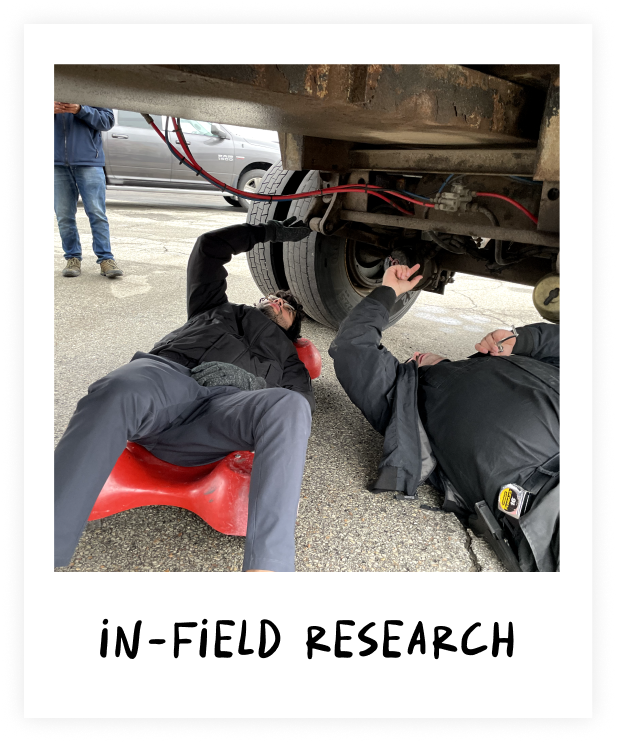
in-field
visits
to observe our target users' current processes and practices in an authentic, natural context
As we gathered more information, we found that there are many reasons for police to approach a truck, but the likelihood of the truck being able to continue its trip is not equal across all contexts of interaction. For example, if the truck is involved in a road collision and gets damaged, any efforts put towards streamlining police-truck interaction would likely be futile, as the truck will still not be able to return to the road due to mechanical breakdowns.
For the scope of this project, we’re looking at cases where the truck can still feasibly return to the road, and, among those scenarios, we’re in search for the most frequent and most time-consuming interactions. Time is money, so fast-tracking these interactions would generate the most added value for Torc and its customers. We also want to focus on interactions that are predictable to some extent, as higher predictability would more likely pave way for the automation of interaction without involving external assistance (e.g., dispatchers or Mission Control).
We ultimately found truck inspection to be the most promising type of police-truck interaction that, if streamlined and expedited, will help maximize value for Torc and other stakeholders. Inspections occur when the police need to verify whether the truck is in an acceptable condition to safely operate on the road. Compared to other interactions such as those prompted by illegal activity or road accidents, inspections happen more consistently and don't diminish the truck's chances of returning to the road, so long as the vehicle meets safety standards.
The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
Keeping this in mind, we are prioritizing truck inspections as the focus of our efforts. The procedures involved in inspections can include anything from verifying documents to examining the vehicle’s interior and exterior. If we can automate inspection, it's likely that we have found a way to automate all types of necessary interactions between police and autonomous trucks.
Through our research on police-truck interactions (with a focus on truck inspections), we gathered a wealth of information and ultimately extrapolated four key insights. These insights are important to consider because they hold implications for how a solution that best streamlines interactions between police and autonomous trucks might look.
The more experience police officers have with inspecting trucks, the more they rely on indicators such as vehicle size, reputation, and safety rating to make systematic decisions about which trucks to inspect.
Although there is a standard checklist of what to do during inspections, a police officer's approach is non-linear, contextual, and dependent on instructions from their department or the carrier.
Police officers currently rely on verbal and gestural language to communicate with truck drivers. They worry that, when interacting with driverless trucks, communication might not be as fluid or effective.
The lack of standardization in the technology infrastructure for law enforcement and trucks eliminates the ability to assume any consistency across different interaction contexts.
The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
The question that Torc tasked us to answer is: How might police interact with driverless trucks?
As such, our problem space lies at the intersection of three different domains: law enforcement, the trucking industry, and autonomous technology. Each of these domains is highly complex and variable, consisting of many moving parts.
From interviewing key stakeholders to directly observing police-truck interactions, we conducted research from multiple angles and surfaced some important insights. Continue reading to learn more!
Our economy depends very heavily on trucks, whether it's the food we eat or the device you're viewing this website on. At the same time, however, qualified truck drivers are leaving the industry in search of jobs that offer better pay, benefits, and working conditions. This leads to a growing mismatch between demand and supply.
of the tonnage that moves across America depends on trucks
driver roles in America were left unfilled in 2021—a record shortage
Let's take a closer look at why the driver shortage might be growing. Currently, when trucks transport goods from Point A to Point B, their journey would roughly look like the diagram below, where there are three separate segments, each handled by a different driver.
Hover over different parts of the journey above to learn more!
As shown above, the middle mile is usually the longest segment. The long haul drivers who navigate the middle mile drive upwards of 11 hours a day on the highway. These long hours, combined with the monotony of highway driving, often result in dangerous levels of fatigue and distraction. In addition, long haul drivers are often subject to unhealthy lifestyles (e.g., sleep in truck, lack of nutritious food) and spend most of their time away from home.
Recognizing the long haul truck drivers' plights and the pressure that driver shortages put on businesses, Torc (partnered with Daimler Truck AG) is working to automate the middle mile.
By introducing autonomous trucks to the middle mile, Torc helps to reallocate scarce driver resources to where they are needed the most: the first and last mile. Skilled drivers are especially valuable at the first and last mile, as those routes often include local roads and urban environments with a higher density of people and objects. By contrast, the middle mile mostly consists of highways, which are often fixed and predictable in a way that's easier for self-driving vehicles to navigate.
Ultimately, Torc's strategic focus on the middle mile is one that will benefit multiple stakeholder groups.
It seems like Torc's autonomous trucks are bound to make everyone happy, but why haven't they become the norm? In reality, we won't be seeing them at mass scale until those who regulate road conditions (e.g., police officers) can communicate with them. In other words, without the ability to smoothly interact with autonomous trucks and assess their compliance to safety standards, law enforcement will not be able to trust their operation.
Even when autonomous trucks do become the norm and police have a way to interact with them, the means of interaction shouldn't come without strategy. When police decide to pull over an autonomous truck, the truck will need to stop; the longer the truck stays halted, the more likely it will fail to deliver on time and lead to additional costs for businesses. Effective and efficient communication is key here.
Altogether, this begs the question...
Keeping the question of “How might we streamline interactions between police and autonomous trucks?" in mind, we defined some key research goals:
Identify how and why police would pull over or interact with a commercial truck today
Learn about needs, potential pain points, and barriers associated with communication between police and commercial trucks
Explore and understand possible interactions between police and autonomous vehicles, assuming they have not interacted prior
Investigate information transfer and communication systems within the autonomous vehicle sector and analogous domains
To fulfill our goals, we employed a variety of research methods, making sure to build a holistic understanding of the problem space and hear from different perspectives.
to better understand the problem domain and investigate existing research and tools in the space
to surface different stakeholders' detailed thoughts, feelings, and beliefs
to observe our target users' current processes and practices in an authentic, natural context
As we gathered more information, we found that there are many reasons for police to approach a truck, but the likelihood of the truck being able to continue its trip is not equal across all contexts of interaction. For example, if the truck is involved in a road collision and gets damaged, any efforts put towards streamlining police-truck interaction would likely be futile, as the truck will still not be able to return to the road due to mechanical breakdowns.
For the scope of this project, we’re looking at cases where the truck can still feasibly return to the road, and, among those scenarios, we’re in search for the most frequent and most time-consuming interactions. Time is money, so fast-tracking these interactions would generate the most added value for Torc and its customers. We also want to focus on interactions that are predictable to some extent, as higher predictability would more likely pave way for the automation of interaction without involving external assistance (e.g., dispatchers or Mission Control).
We ultimately found truck inspection to be the most promising type of police-truck interaction that, if streamlined and expedited, will help maximize value for Torc and other stakeholders. Inspections occur when the police need to verify whether the truck is in an acceptable condition to safely operate on the road. Compared to other interactions such as those prompted by illegal activity or road accidents, inspections happen more consistently and don't diminish the truck's chances of returning to the road, so long as the vehicle meets safety standards.
Keeping this in mind, we are prioritizing truck inspections as the focus of our efforts. The procedures involved in inspections can include anything from verifying documents to examining the vehicle’s interior and exterior. If we can automate inspection, it's likely that we have found a way to automate all types of necessary interactions between police and autonomous trucks.
Through our research on police-truck interactions (with a focus on truck inspections), we gathered a wealth of information and ultimately extrapolated four key insights. These insights are important to consider because they hold implications for how a solution that best streamlines interactions between police and autonomous trucks might look.
The more experience police officers have with inspecting trucks, the more they rely on indicators such as vehicle size, reputation, and safety rating to make systematic decisions about which trucks to inspect.
Although there is a standard checklist of what to do during inspections, a police officer's approach is non-linear, contextual, and dependent on instructions from their department or the carrier.
Police officers currently rely on verbal and gestural language to communicate with truck drivers. They worry that, when interacting with driverless trucks, communication might not be as fluid or effective.
The lack of standardization in the technology infrastructure for law enforcement and trucks eliminates the ability to assume any consistency across different interaction contexts.
