The context of design
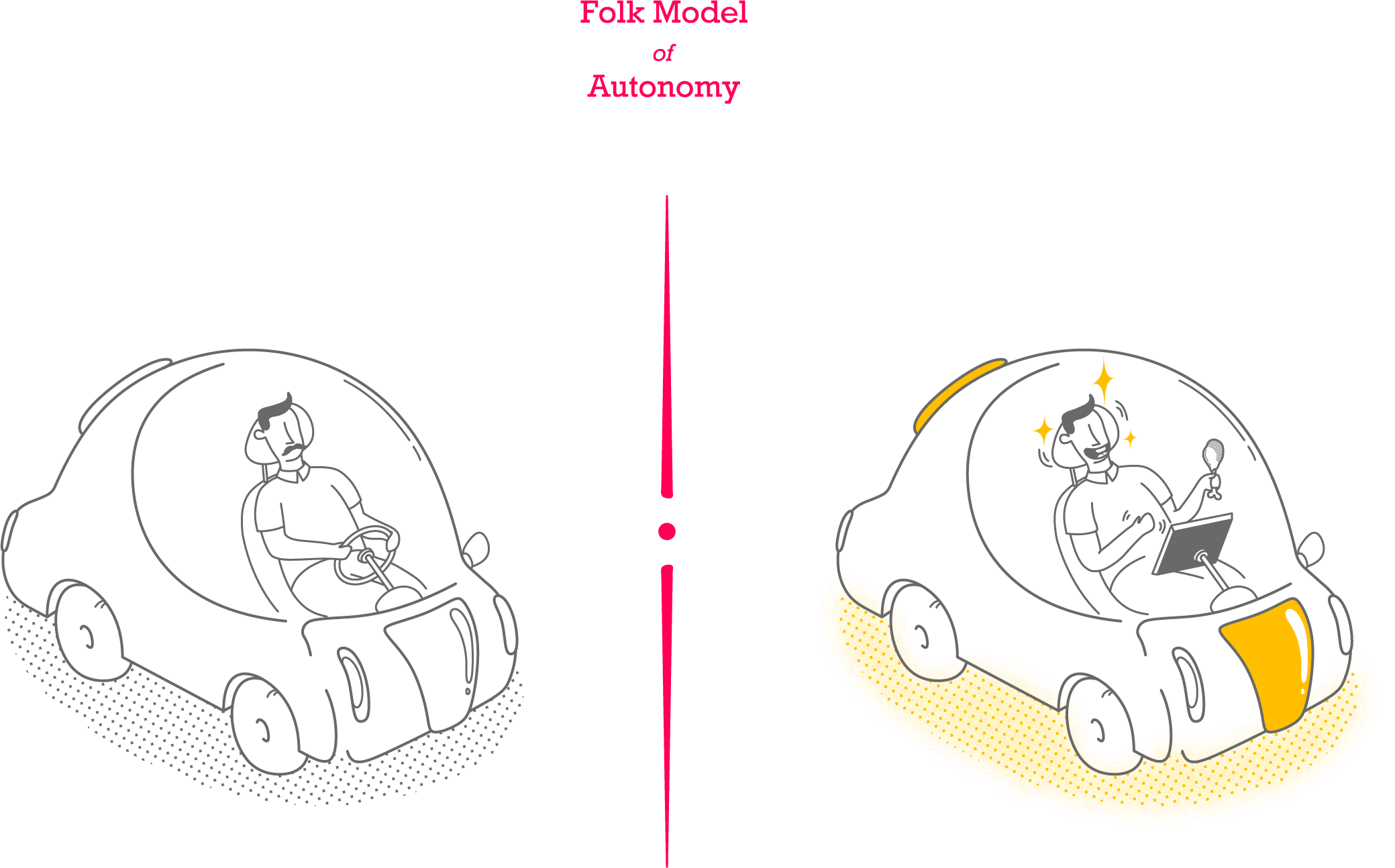
Folk Model of Autonomy
Through our research we found that there is a common misconception about autonomy: that it is binary. The prevailing idea is that the occupant of the vehicle is either not driving at all because the vehicle has taken over, or that the occupant is engaged fully in a manual driving task.
In reality, self driving is a mix of human supervision and assistive control provided by the vehicle. The occupant does not have the luxury of enjoying the activities one would in say their living room. In fact, they must be prepared to take over at anytime.
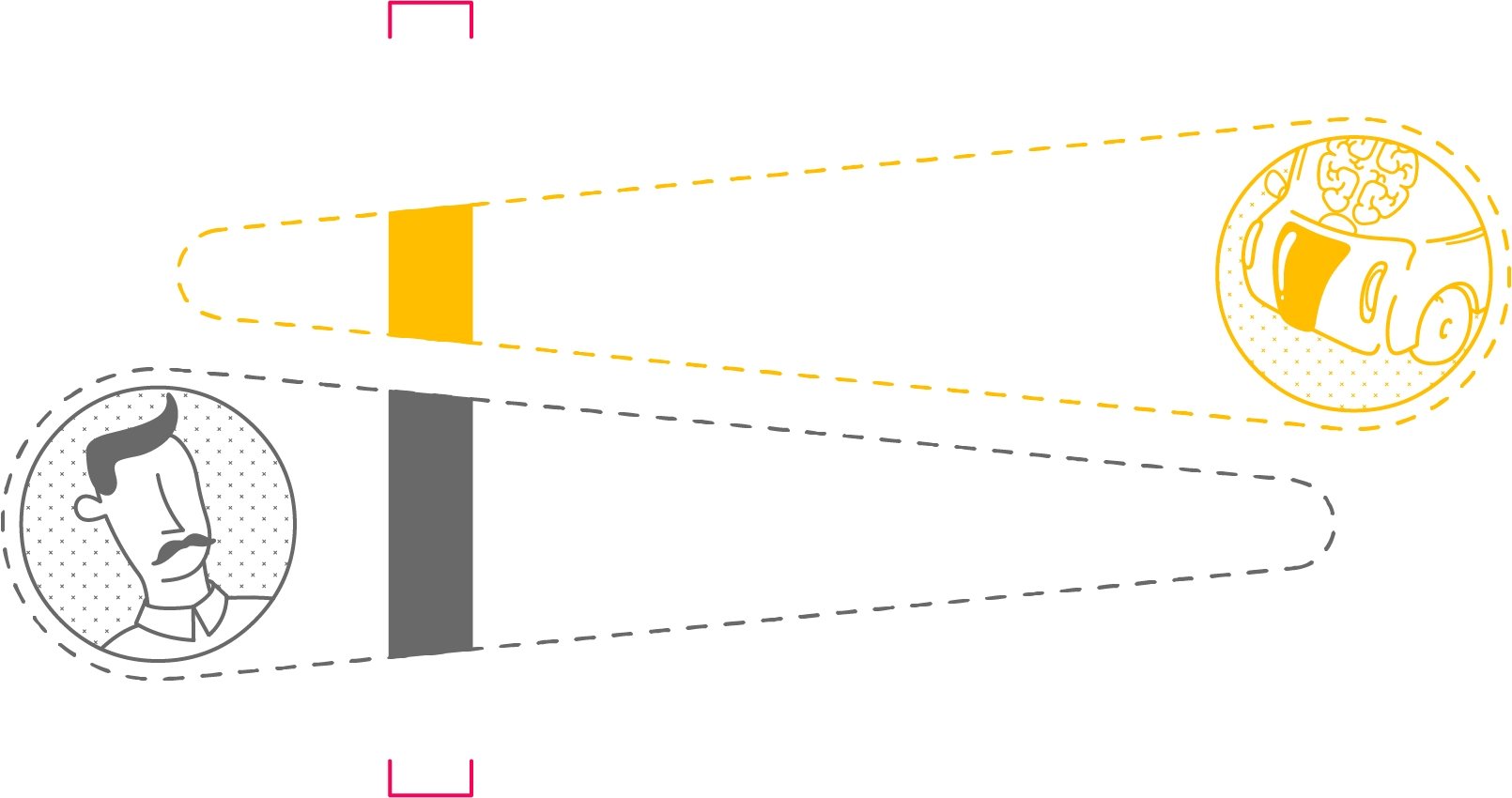
Who's In Control
Technology is gradually shifting toward a state in which the vehicle can handle every single possible situation, without the need for human supervision or intervention. That shift is occurring over time, as AI masters more and more of the multitude of tasks involved in driving.

State of Self-Driving Technology
Today, Tesla's AutoPilot is the most advanced commercially available autonomous driving system. It can maintain a position in a lane, change lanes, and adaptively control your distance to the car in front. It is only intended for use on highways. Other companies have achieved greater capabilities, but the technology is only reliable in highly controlled environments.
Designing for the Next 5-10 Years
During the gradual shift towards full autonomy the driver and and the vehicle are sharing control and this is the period for which we are designing as well as where we focused our research effort.
The difficulty moving past that period, of capturing all of the complex edge cases at the end of the spectrum required for full autonomy, is the reason that companies like Nissan are investing in centers that can virtually control your vehicle. They also do not believe that full autonomy will occur in the next 5-10 years

A Better System for Shared Control
Today, when an a passenger encounters an edge case outside of the vehicle's capabilities, or when they are dissatisfied with the choice of the vehicle and want to influence the decisions being made by an autonomous vehicle, the primary option is to fully takeover driving, then hand back control.
We are proposing a design that facilitates an ongoing interaction between the human and the vehicle without the need for a repeated handoff and takeover. In this system, control of the vehicle is collaborative and continuous. The occupant is able to tailor his or her driving experience at critical moments
The paradigm of full takeover to handoff is laborious and not well suited for individual adjustments executed throughout a drive.
An Interface for Collaborative Control
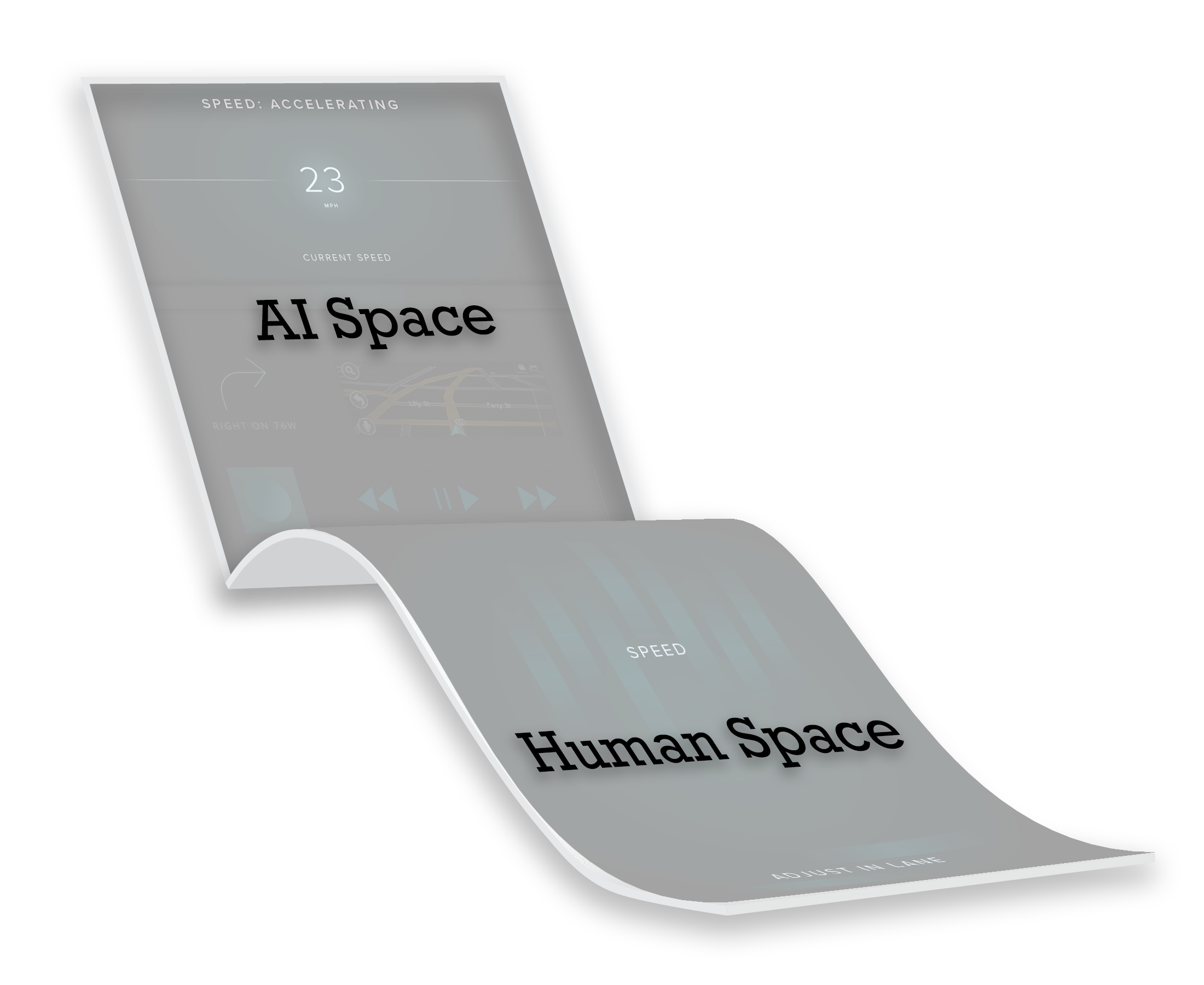
We concluded that in order to ensure a positive driving experience in a semi-autonomous/co driving context, the human has to be more than a babysitter for the vehicle; they cannot simply supervise, but rather they must be an active participant in their own experience.
We facilitate active participation through a curved interface that clearly delineates the intentions of the vehicle from the options that the driver has to influence his or her own experience.
As a focus of our research, we sought to identify what those influences should be.
Back to Top