Giving Safe Control
Allowing a collaborative driving experience between humans and autonomous vehicles.
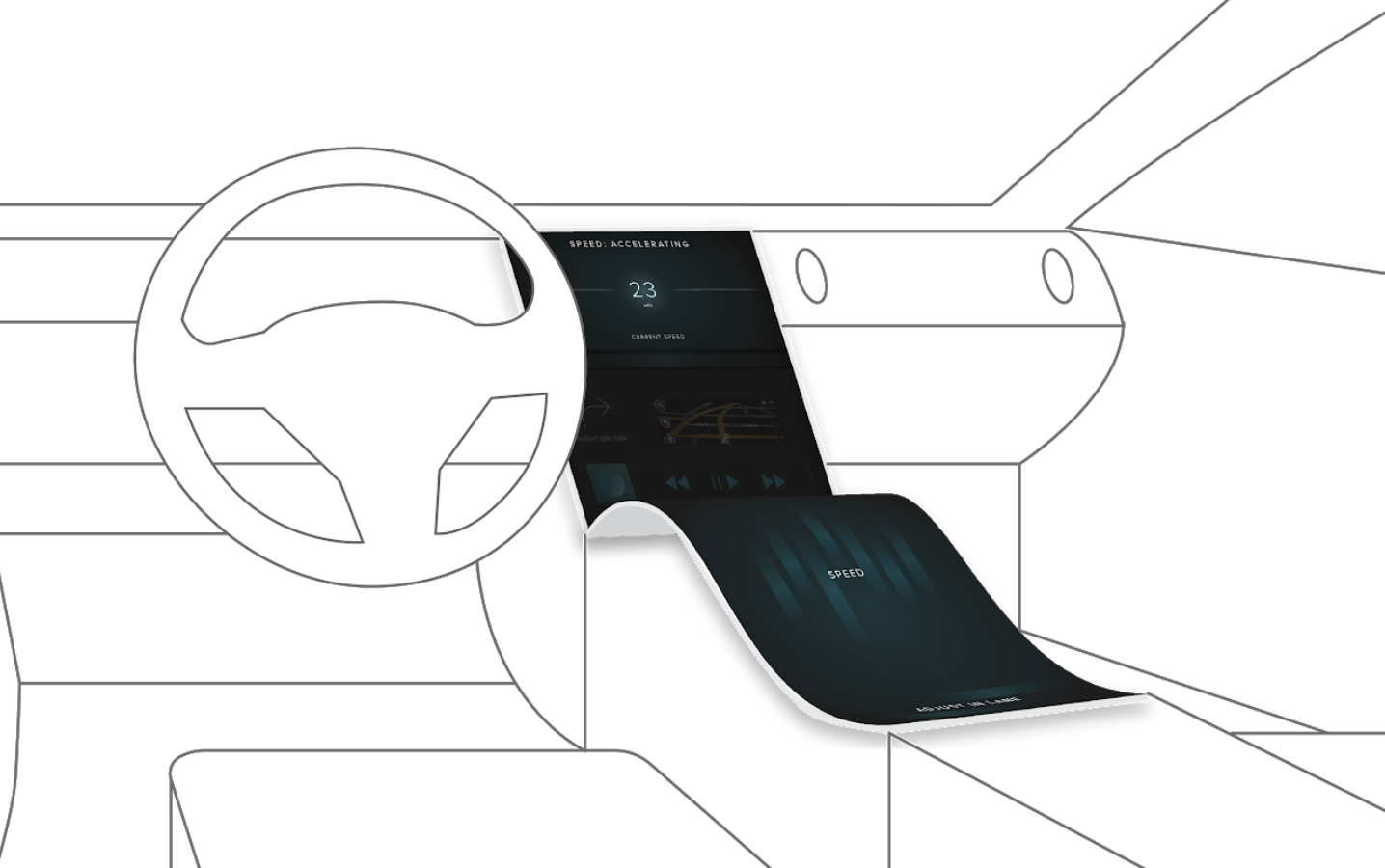
Our unique interface provides a means for a human driver to interact with an AI which gives the driver a sense of control over a vehicle they are not directly driving. It provides unique affordances to help the human better understand how they can alter the performance of the car while the car is operating on its own, with multiple means of feedback. Most importantly, this complete interface for interacting with an autonomous vehicle pioneers new means of decision making between the vehicle and the human in a collaborative way.
A visualization of our interface in a vehicle
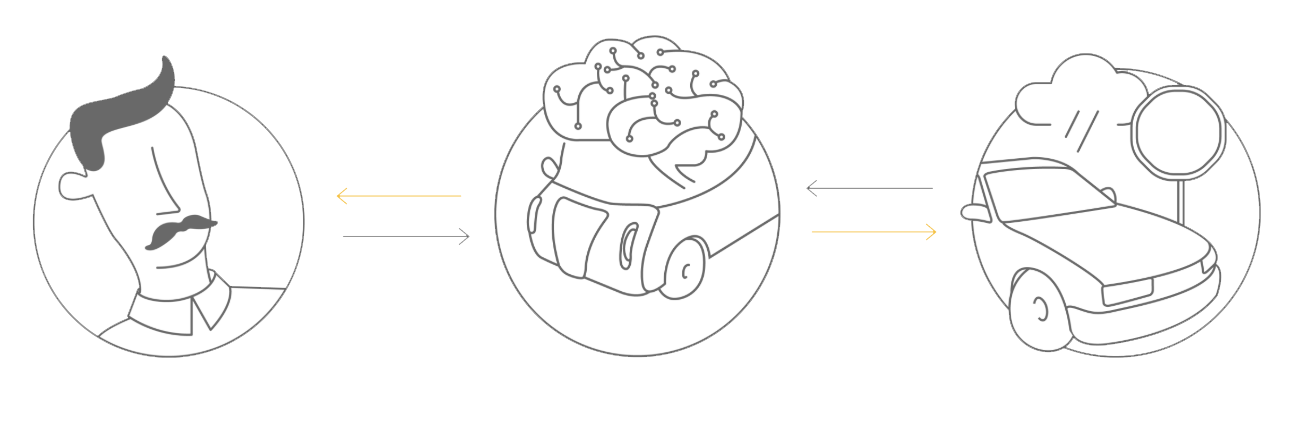
Collaborative Decision Making Between Human and AI
The cooperative control introduced by our autonomous driving control paradigm supports the means of decision making with technology spearheaded by other innovations.
The complete control system allows for a relationship between the human and the AI in a means that is more collaborative than the traditional master/slave relationships of past technologies. We chose to take what is known as a “loose reign” approach to controlling the autonomous vehicle, meaning the command the user sends to the car is filtered through the car’s own artificial intelligence and is acted upon only if the surrounding driving environment permits the action. This means if the human is trying to tell the car to speed up, but the car does not recognize its own position as being appropriate to speed up (such as being at a red light, or stuck in bumper-to-bumper-traffic) the car does not speed up. The car knows what is safe and will only fulfill the request of the human if it can continue to operate safely.
In our research we found there are many prompts and opportunities always available to a driver in a traditional non-autonomous system. For the scope of our project, we decided to focus down on three: speed management, adjustment within a lane, and generic go/don’t go decisions. These prompts of course live under the loose reign paradigm, meaning the human can only adjust these assets of a car’s driving performance if it is safe to do so; the car knows if the human’s actions will continue to result in a safe driving experience.
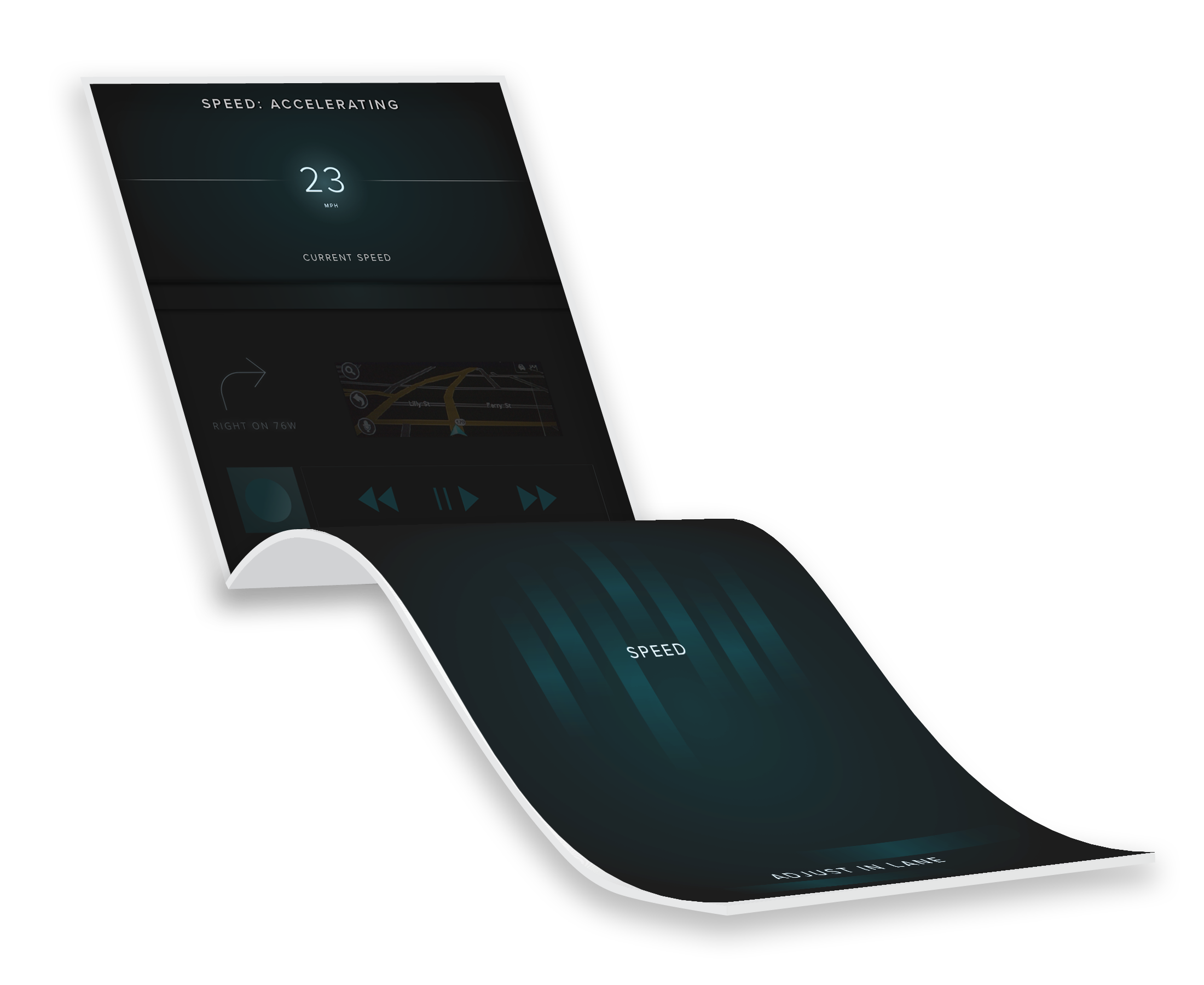
Interfaces
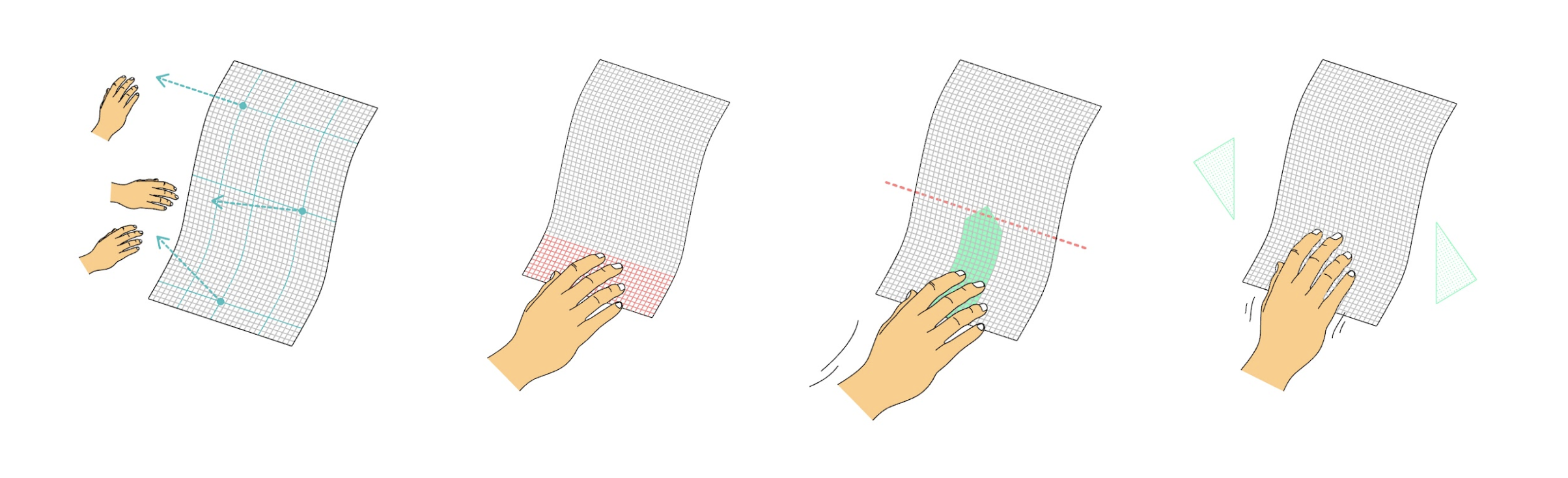
Our bottom interface for control is interactive, allowing for users to send various commands to the vehicle based on external driving context. Through our research, we understood the need to allow personalization in the autonomous driving experience, through the use of several various use cases including speed control, adjustment of the vehicle within a lane, and general binary decision making (a go/don’t go decision).
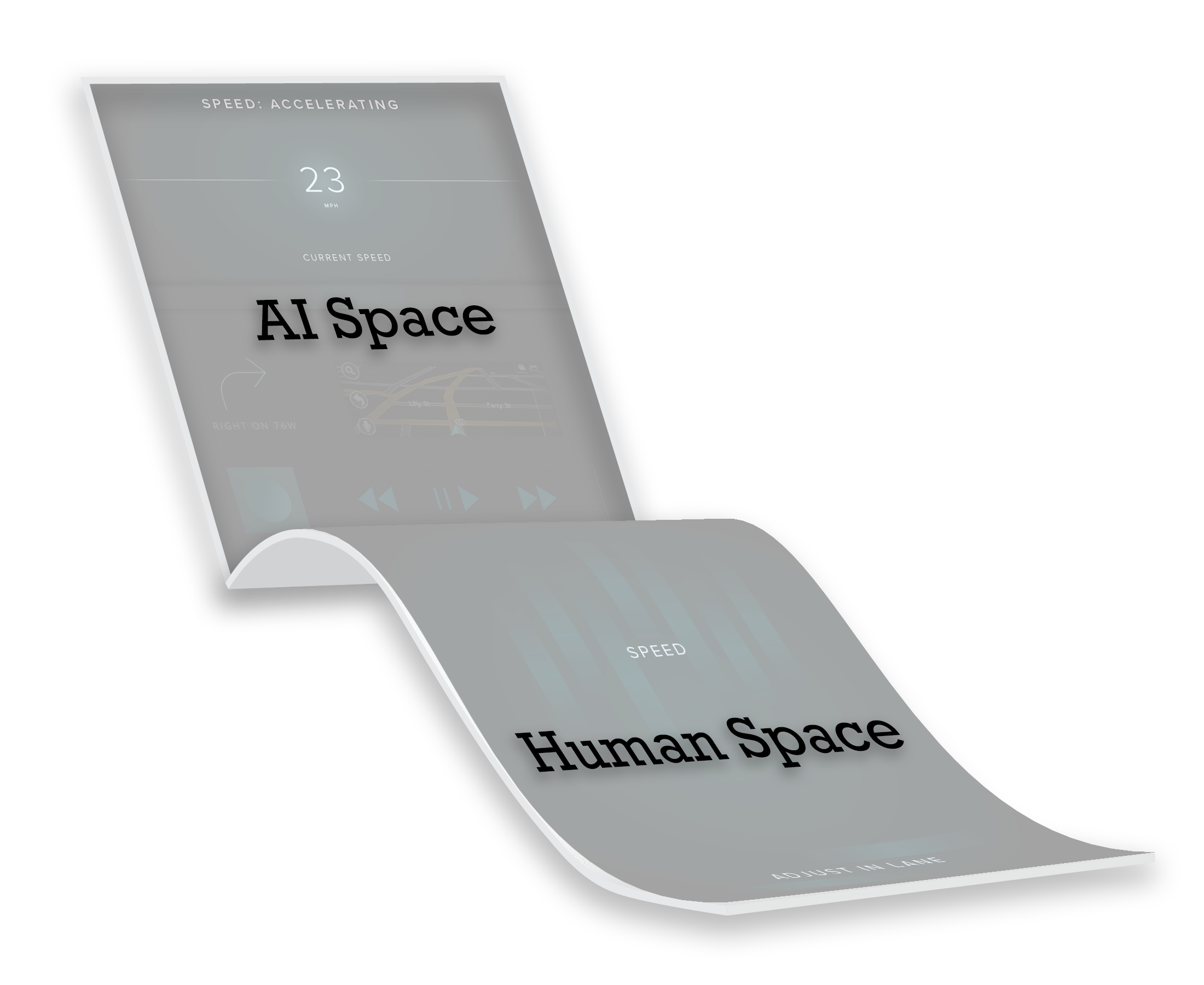
For our speed and lane position interface, we recognized the need for users to have constant access to making these more continuous adjustments. We also understood the positional affordances of the four general cardinal directions and exposed them to provide affordances for controlling speed and positioning within a lane (or “lane nudging”).

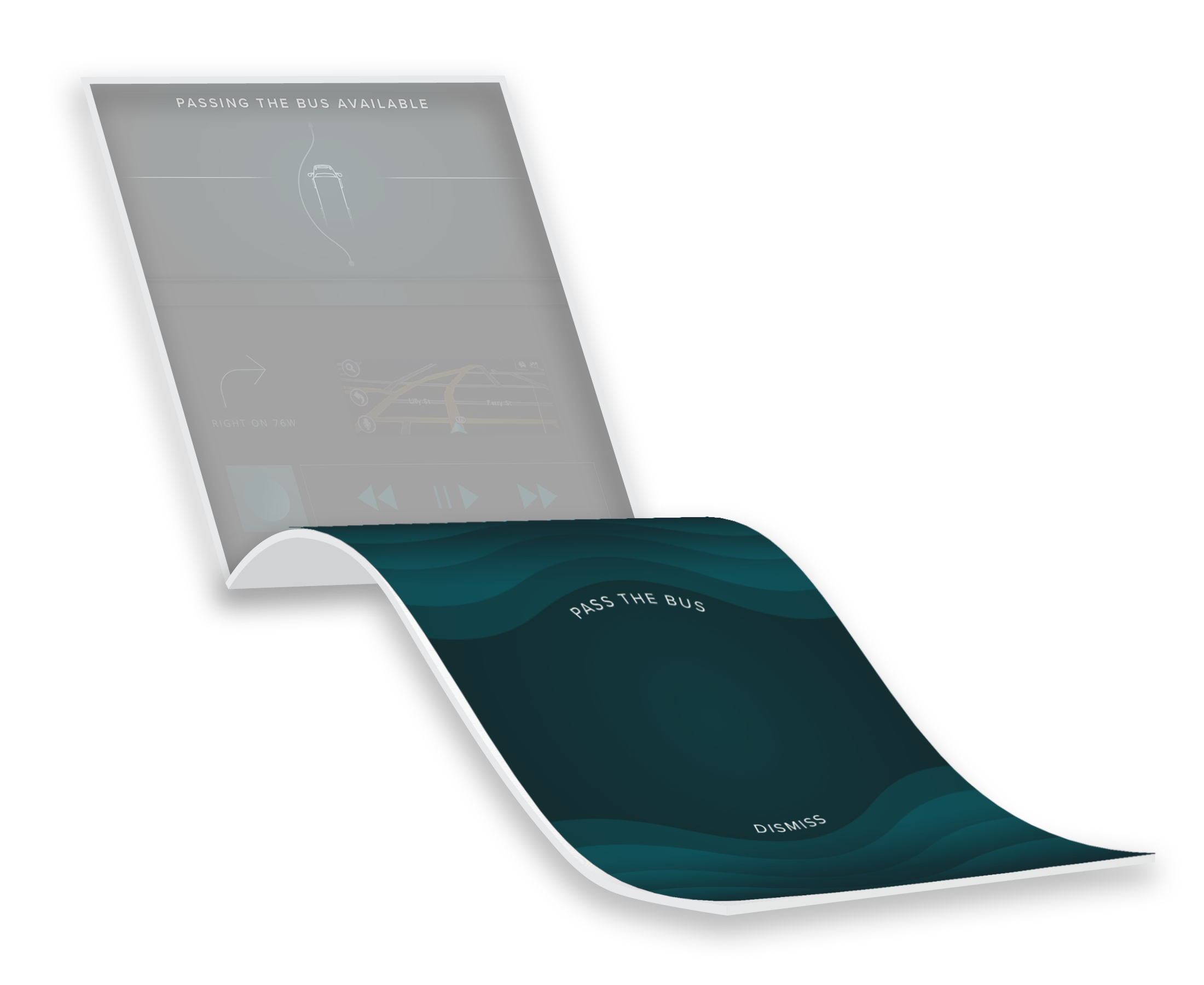
Other driving factors, such as whether or not to make a right turn at a red light, are a bit more hazy, with opportunities presenting themselves but the personalization of the overall driving experience leaves these sorts of decisions undefined from the perspective of the AI. We call these binary decisions. We constructed an interface for these binary decisions that not only scales to meet the unpredictable nature of a drive, but ensures the user is making a calculated decision through a more dedicated “confirm” or “deny” action.
Curvature
The most unique aspect of the overall design is the curved input control sitting below. The curvature provides affordances as to hand and finger positioning which allow the user to make more informed decisions about where their hand position is and where they wish to move to without needing to look and place the hand on the desired point.
Secondary Monitor
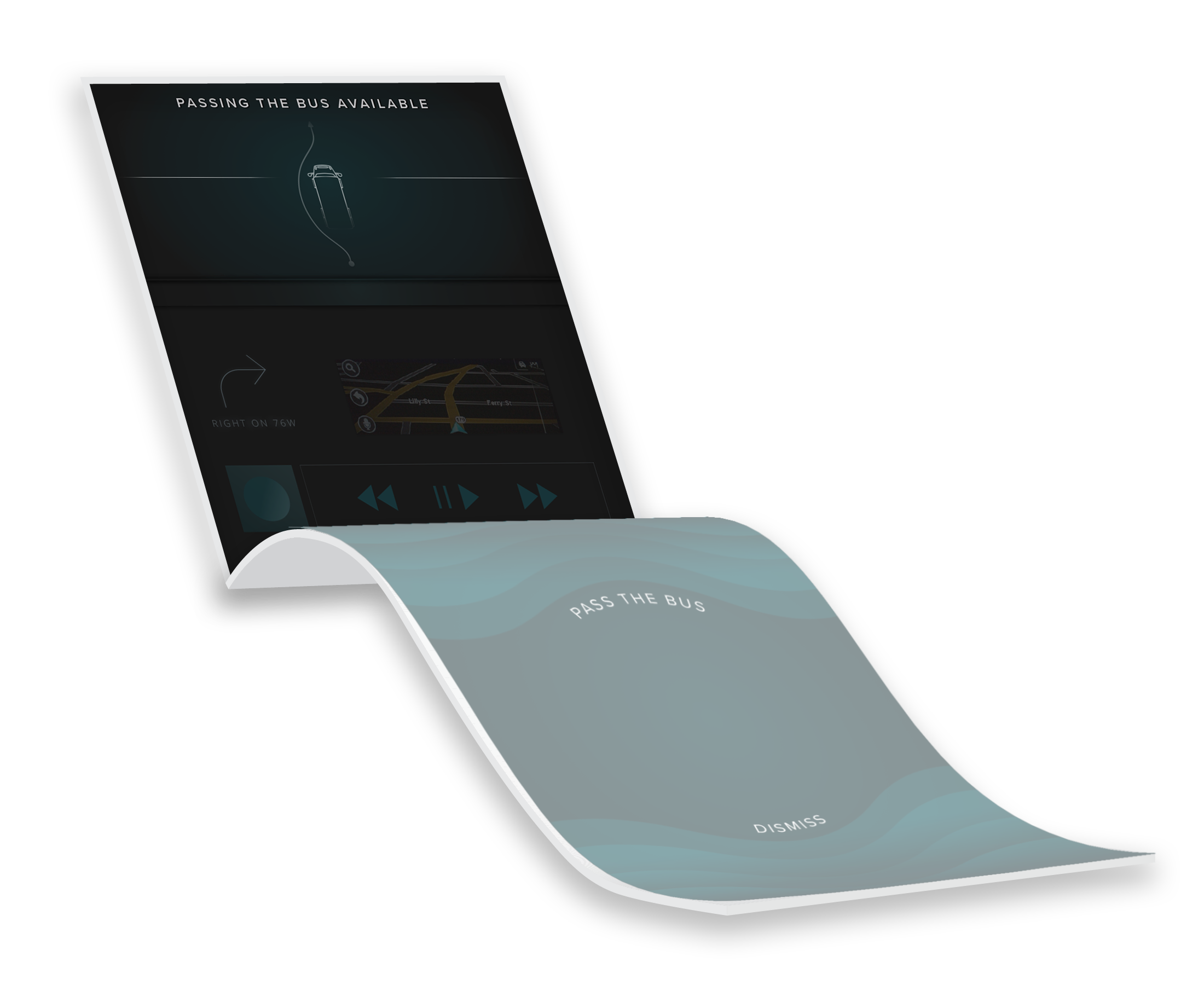
The need for visual feedback about controlling a car not being driven is critical. Being able to see whether or not the command requested by the human to the car was heard allows for better confidence in the autonomous driving experience. The monitor is synchronized with the curved input control to allow for real-time feedback on what alterations to the current drive can be made.