Team NASA
Building Efficient Interfaces for Robotic Activity Planning
2006
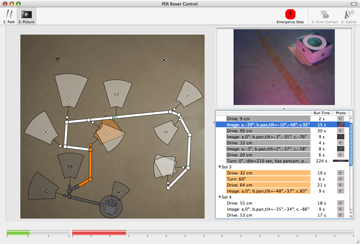
The goal of this project was to design and develop an efficient interfaces for robotic activity planning for use by multiple people.
Client/Sponsor Link
NASA
Link to Project
Building Efficient Interfaces for Robotic Activity Planning
Students
Melissa Ludowise, Ronald Conescu, Lily Cho, Alexander Eiser, Jack Li