Team NASA
Rover Planning and In-Situ Re-Tasking
2005
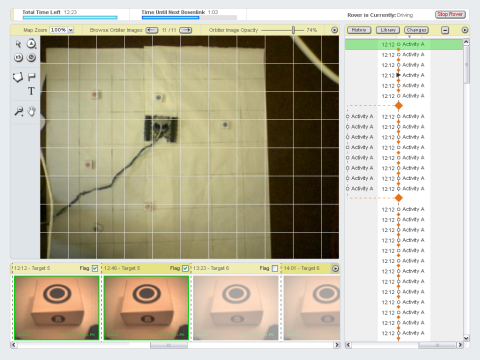
The goal of this project was to design and develop an interface to facilitate in-situ re-tasking of generalizable robotic platforms, addressing new challenges in human-mission interaction.
Client/Sponsor Link
NASA
Link to Project
Rover Planning and In-Situ Re-Tasking
Students
Marina Kobayashi, Guy Pyrzak, Christian Ratterman, Gregory Vassallo, Karen Wong, Shannon O'Brien